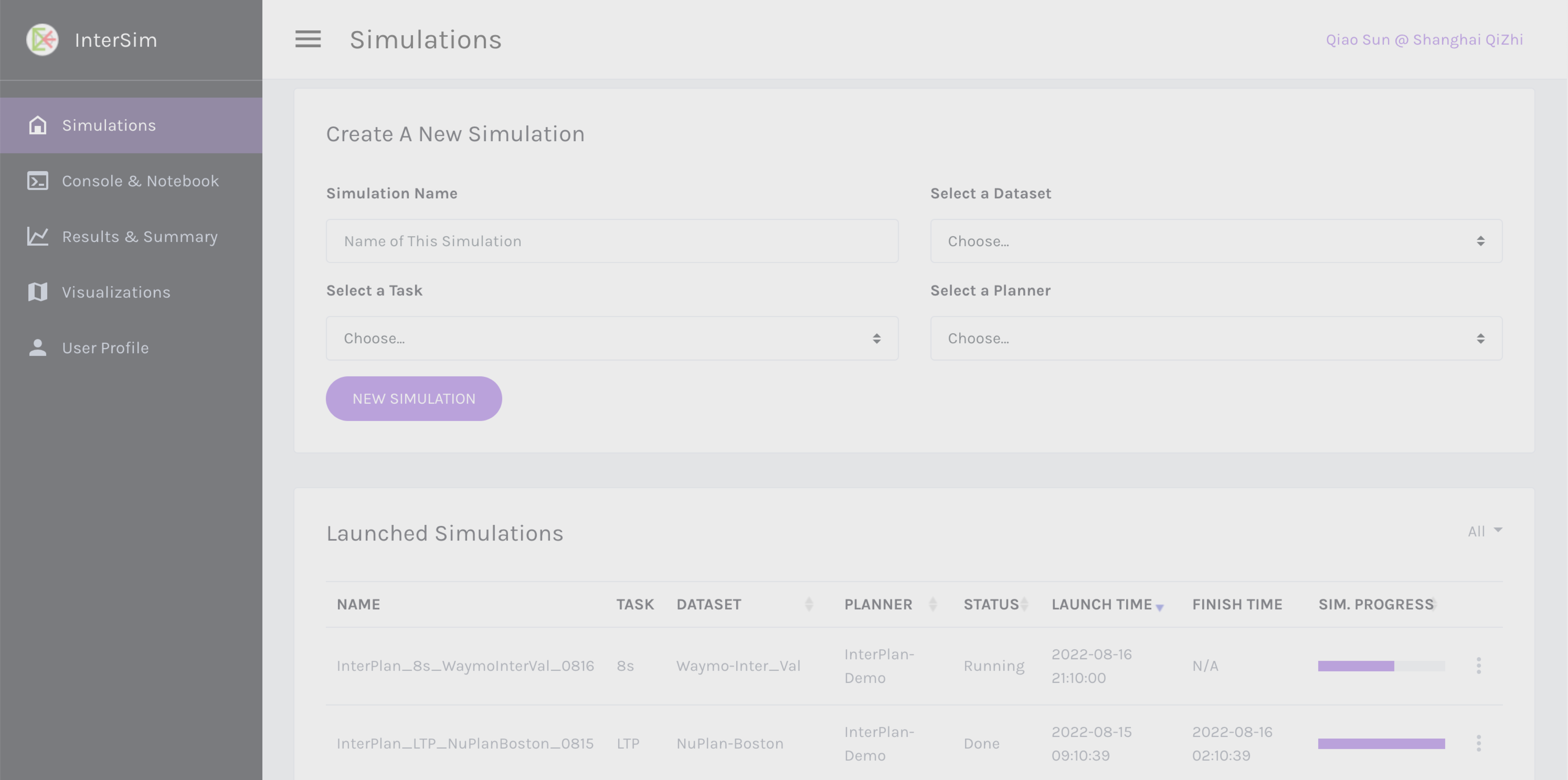
InterSim
Interactive Traffic Simulation via Explicit Relation Modeling
Qiao Sun1, Xin Huang2, Brian Williams2, Hang Zhao1
1 IIIS, Tsinghua University, 2 CSAIL, Massachusetts Institute of Technology
IROS 2022
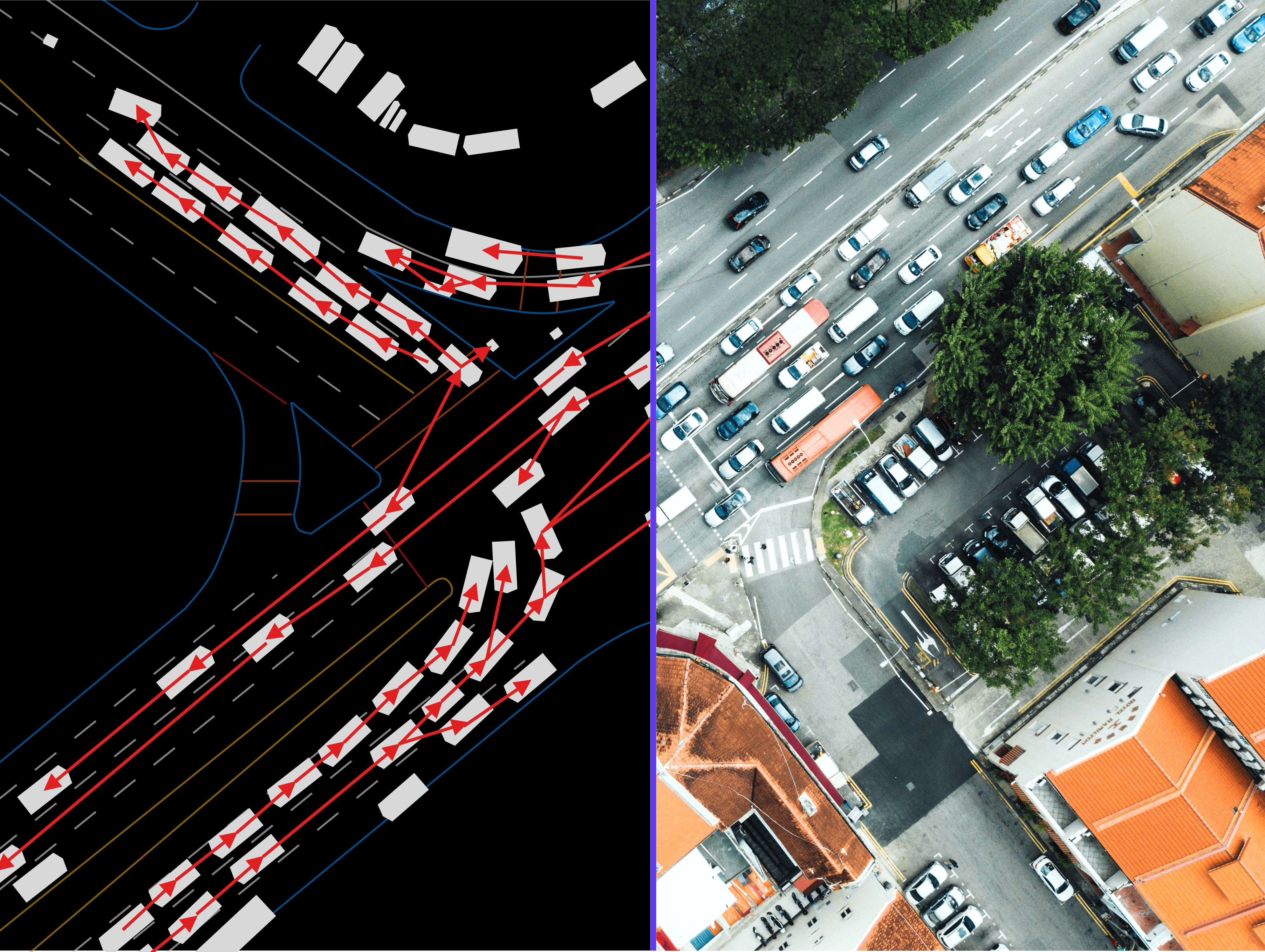
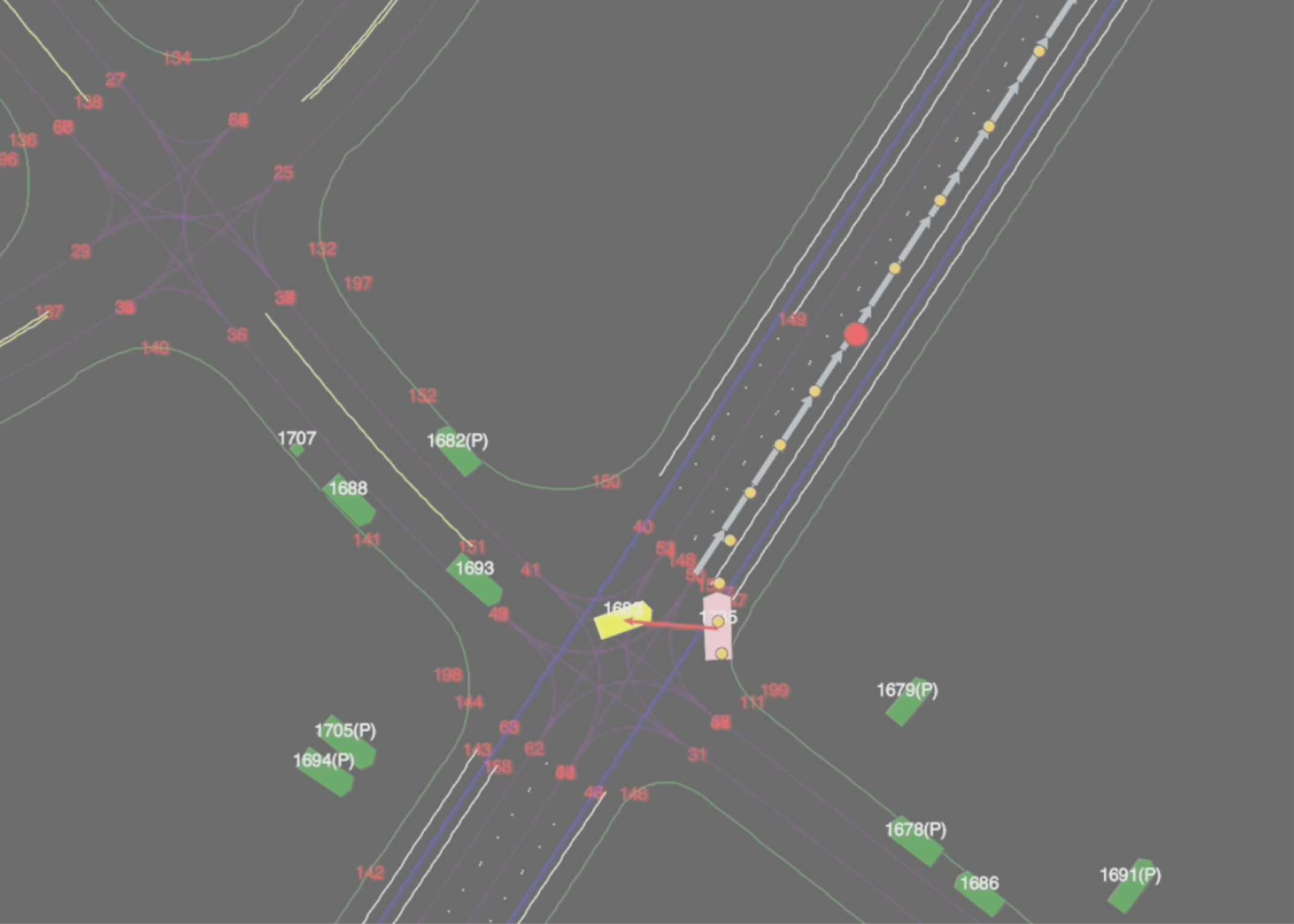
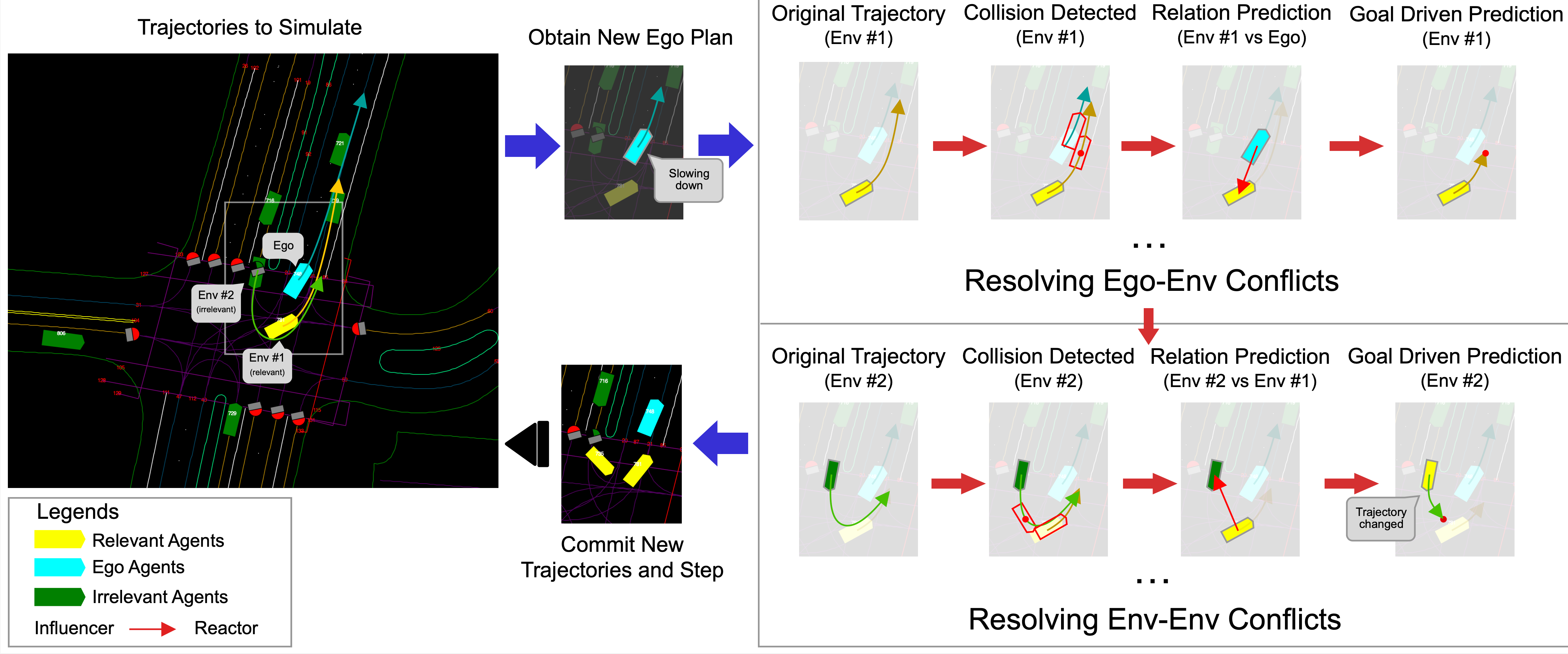
InterSim is a simulator that loads real world dataset and run interactive closed-loop simulations. InterSim minimizes the sim2real gap by explicitly modeling the relations of the surrouding traffic.