M2I: From Factored Marginal Trajectory Prediction to Interactive Prediction
Qiao Sun1*, Xin Huang2*, Junru Gu1, Brian Williams2, Hang Zhao1
* denotes equal contribution
1 IIIS, Tsinghua University, 2 CSAIL, Massachusetts Institute of Technology
CVPR 2022
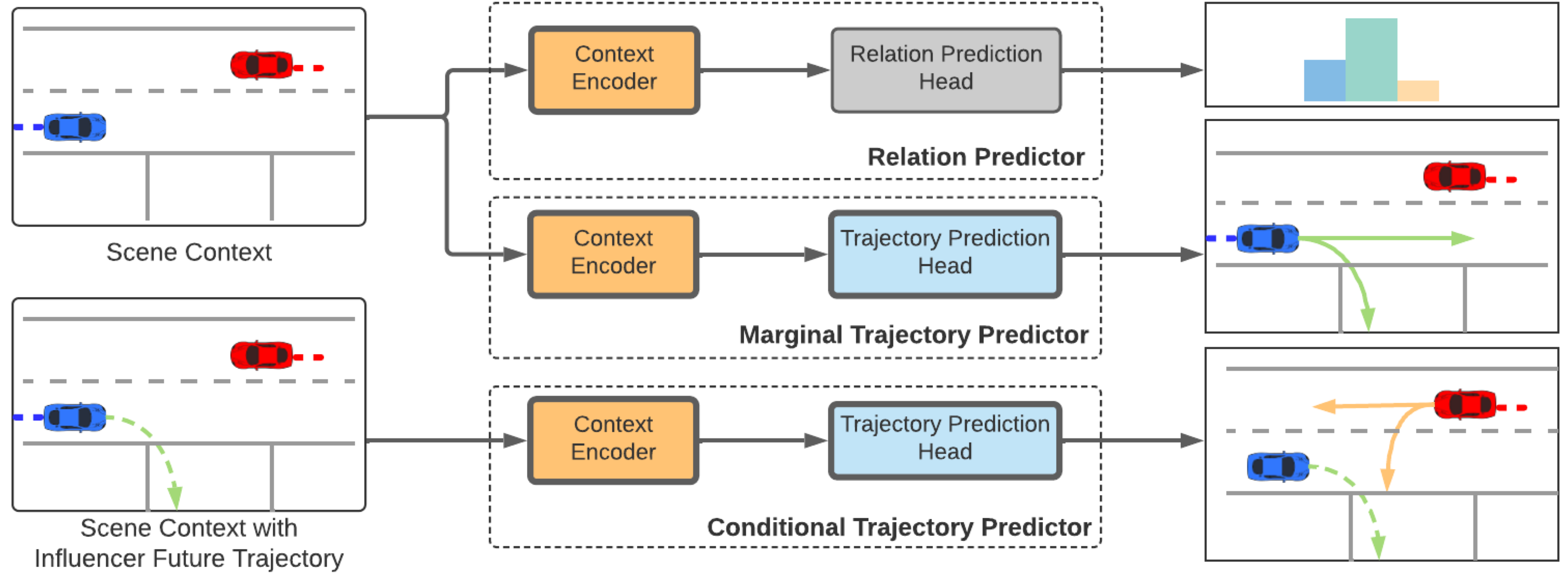
M2I is a simple but effective joint motion prediction framework through marginal and conditional predictions by exploiting the factorized relations between interacting agents.