1Shanghai Qi Zhi Institute,
2IIIS,Tsinghua University,
3MIT
CVPR 2023
The Neural Map Prior (NMP) is a learning-based framework that employs a neural representation of global maps
to improve local map inference performance for autonomous driving.
Multi-Trip Map Construction Showcase
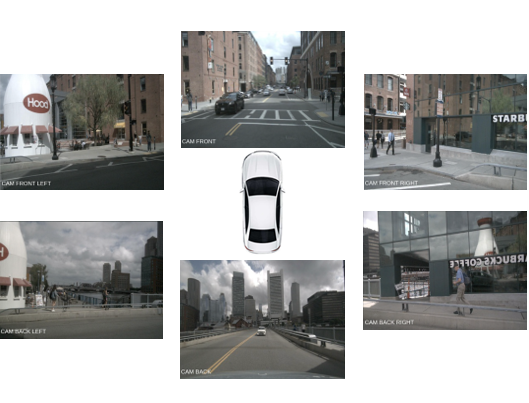
Visualization of Map Construction and Updates. The left side showcases six surrounding input images, alongside a comparative analysis of local online map construction with and without the utilization of map prior, while the right side demonstrates the situation after global map updates.
Pipeline
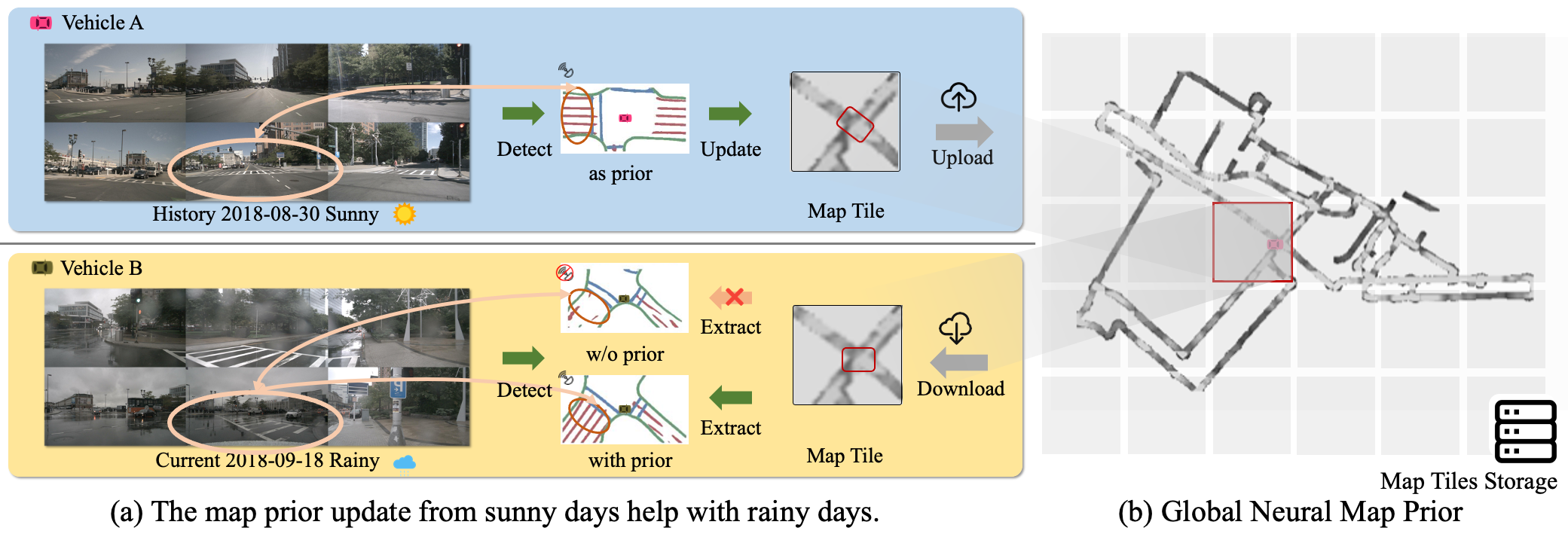
Demonstration of NMP for autonomous driving in adverse weather conditions. Ground reflections during
rainy days make online HD map predictions harder, posing safety issues for an autonomous driving system. NMP
helps to make better predictions, as it incorporates prior information from other vehicles that have passed
through the same area on sunny days.
Abstract
Traditional offline HD maps, created through manual annotation processes, are both costly and
incapable of accommodating timely updates. On the other hand, online map inference methods
are constrained by the sensor perception range and is susceptible to occlusions.
We propose Neural Map Prior (NMP), a neural representation of global maps that facilitates automatic global map
updates and improves local map inference performance.
To incorporate the strong map prior into local map inference, we employ cross-attention that dynamically
captures correlations between current features and prior features. For updating the global neural map prior, we
use a learning-based fusion module to guide the network in fusing features from previous traversals. This design
allows the network to capture a global neural map prior during sequential online map predictions.
Experimental results on the nuScenes dataset demonstrate that our framework is highly compatible with various
map segmentation and detection architectures and considerably strengthens map prediction performance, even under
adverse weather conditions and across longer horizons. To the best of our knowledge, this represents the first
learning-based system for constructing a global map prior.
Main Idea
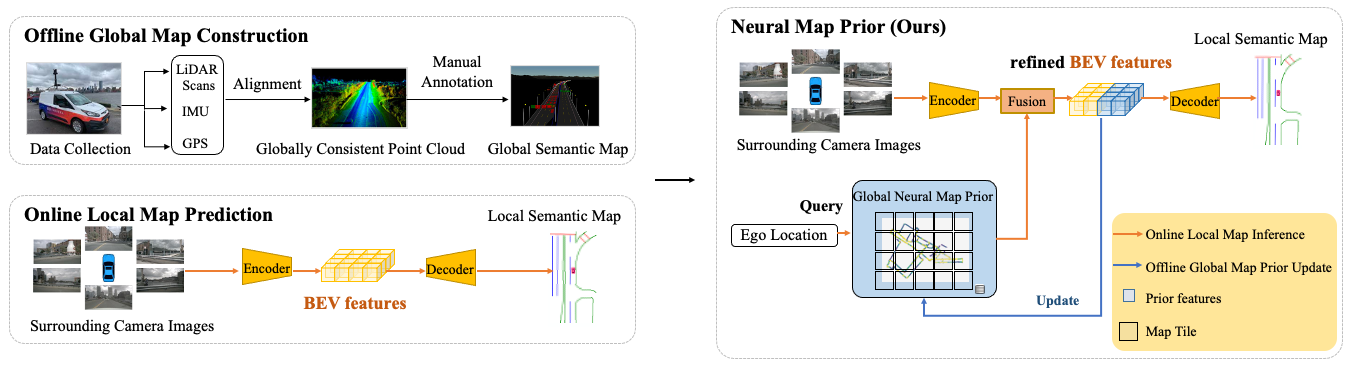
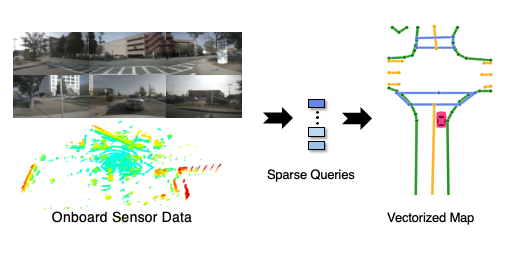
Main idea. Traditional offline semantic mapping methods (first row from left) involve a complex manual
annotation pipeline and do not support timely map updates. Online HD semantic map learning methods (second row
from left) rely entirely on onboard sensor observations and are susceptible to occlusions. We propose the Neural
Map Prior (on the right), an innovative neural representation of global maps designed to aid onboard map
prediction. NMP is incrementally updated as it continuously integrates new observations from a fleet of
autonomous vehicles.
Architecture
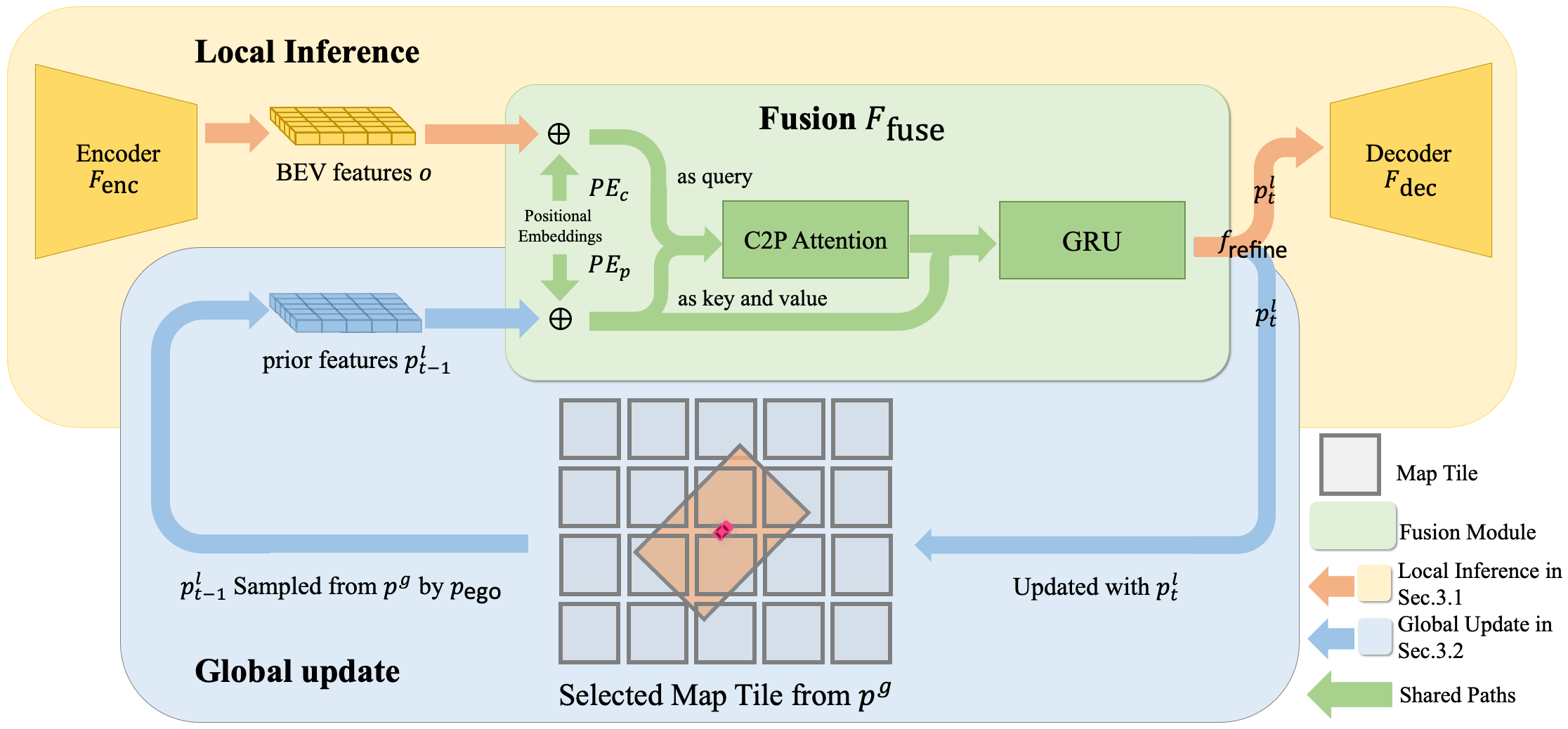
The model architecture of NMP. The top yellow box illustrates the online HD map learning process, which
takes images as input and processes them through a BEV encoder and decoder to generate map segmentation results.
Within the green box, customized fusion modules—comprising C2P attention and GRU—are designed to effectively
integrate prior map features between the encoder and decoder, subsequently decoded to produce the final map
predictions. In the bottom blue box, the model queries map tiles that overlap with the current BEV feature from
storage. After the update, the neural map is returned to the previously extracted map tiles.
Results
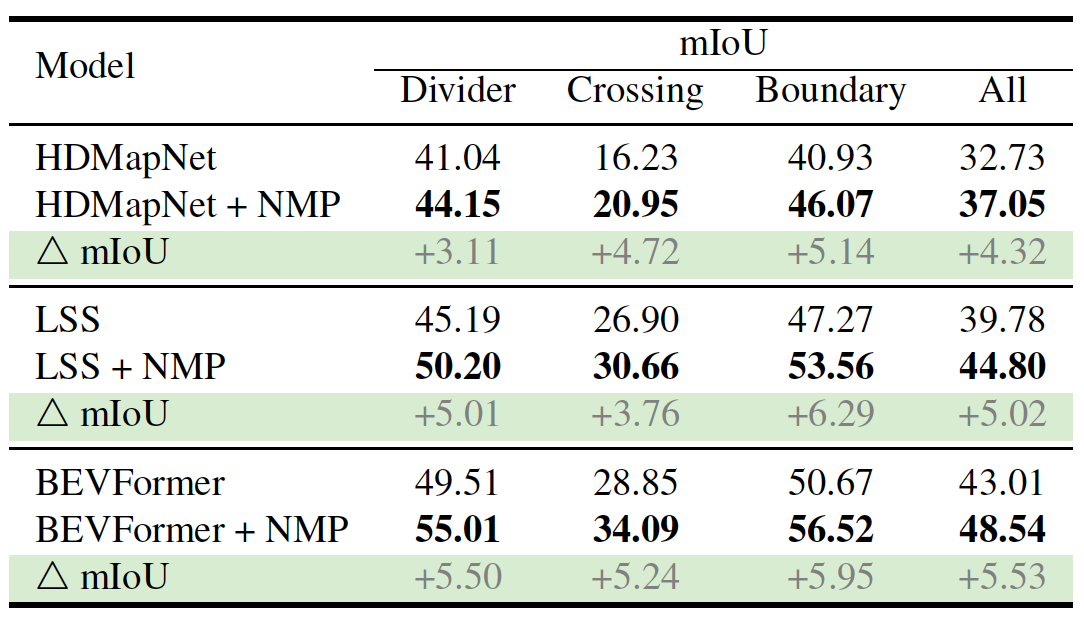
Quantitative analysis of map segmentation. The performance of online map segmentation methods and their
NMP versions on the nuScenes validation set. By adding prior knowledge, NMP consistently improves these methods.
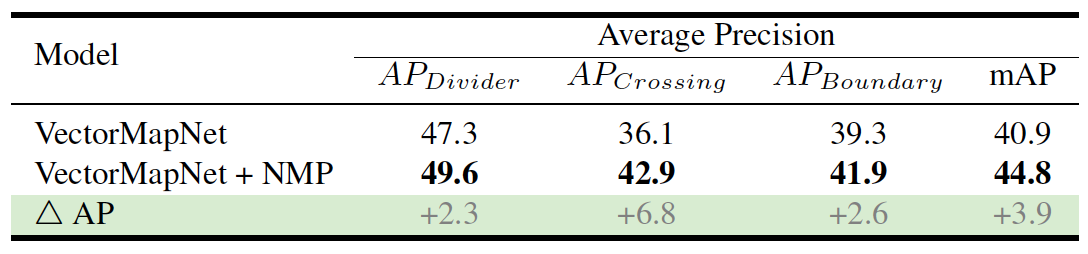
Quantitative analysis of map detection. The performance of map detection method and its NMP version on
the nuScenes validation set. Results show that by adding prior knowledge, the NMP enhances the quality of
VectorMapNet.
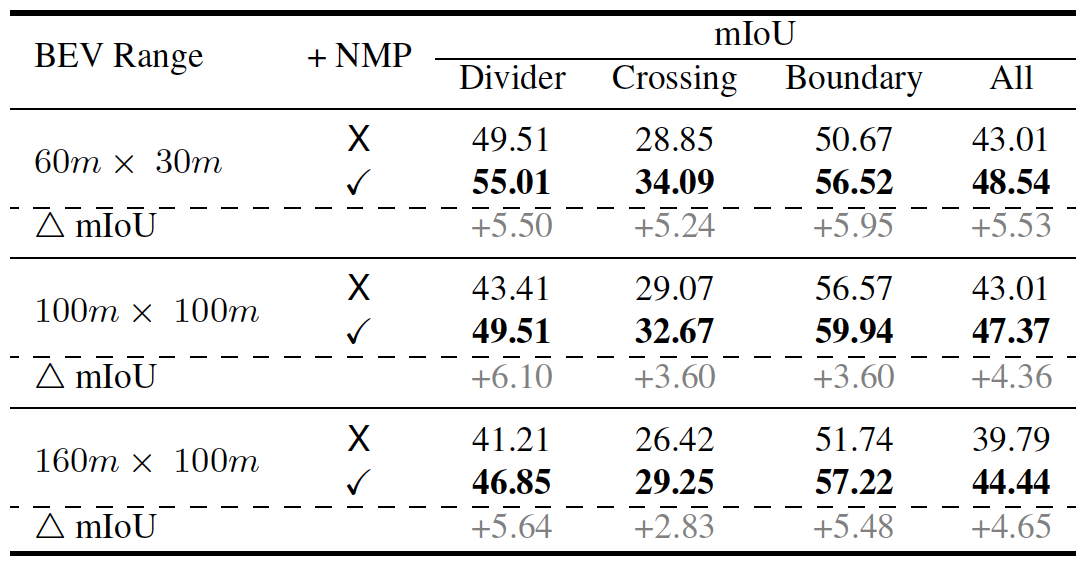
Comparison of model performance at different BEV ranges. As the perception range increases, it is
difficult for the online method to achieve good results; NMP significantly improves the results.
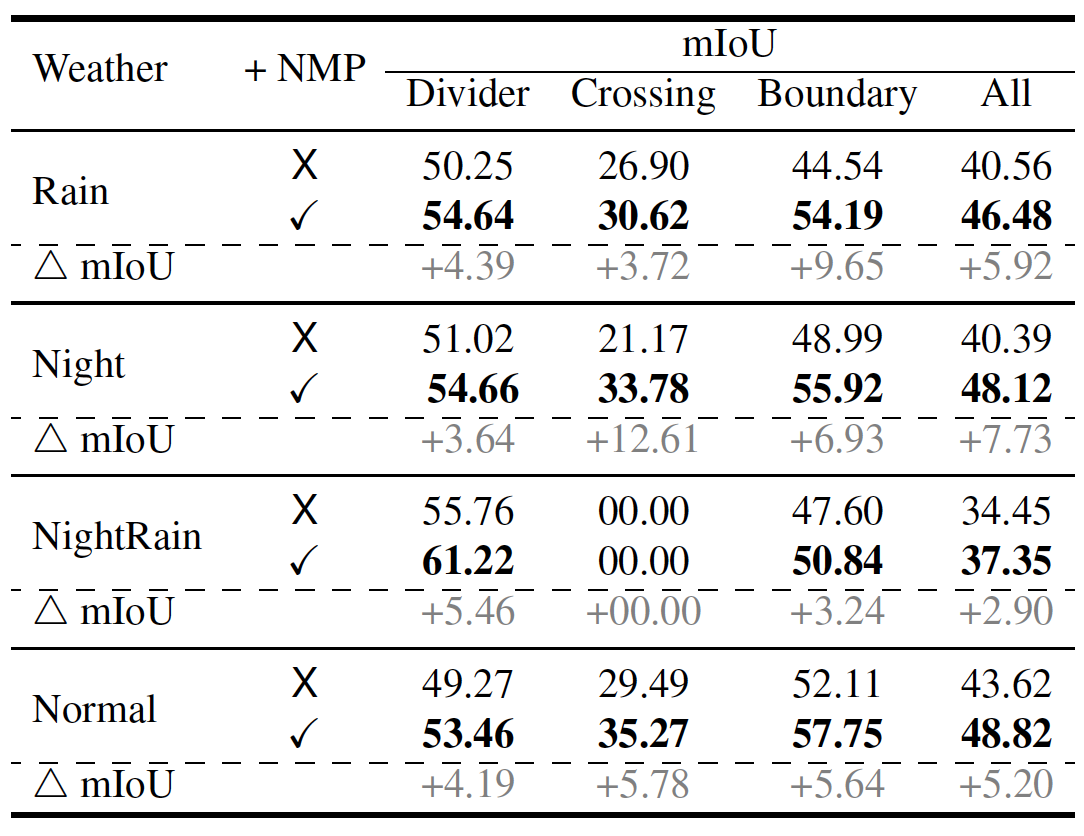
Performance in adverse weather conditions. Neural map priors are particularly useful on rainy days and at
night than in normal weather.
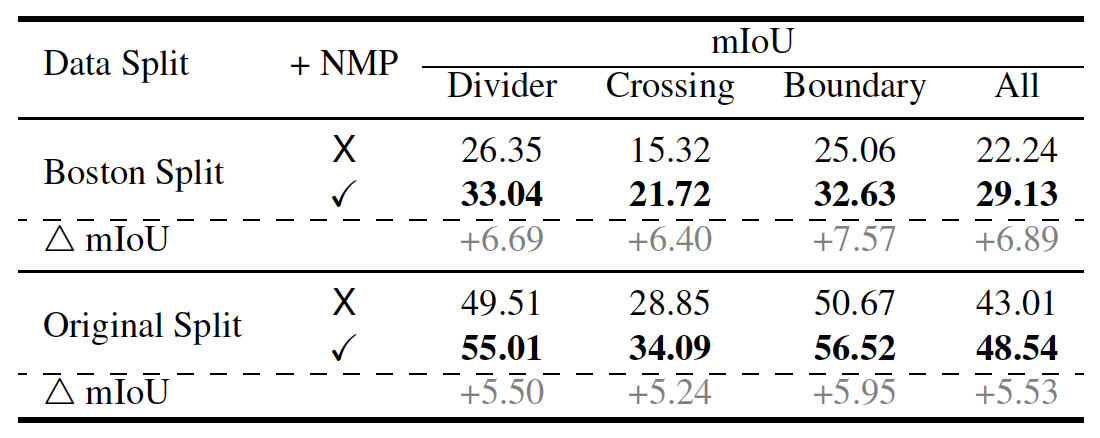
Performance on Boston split. The original split contains unbalanced historical trips for the training and
validation sets; Boston split is more balanced.
Comparison
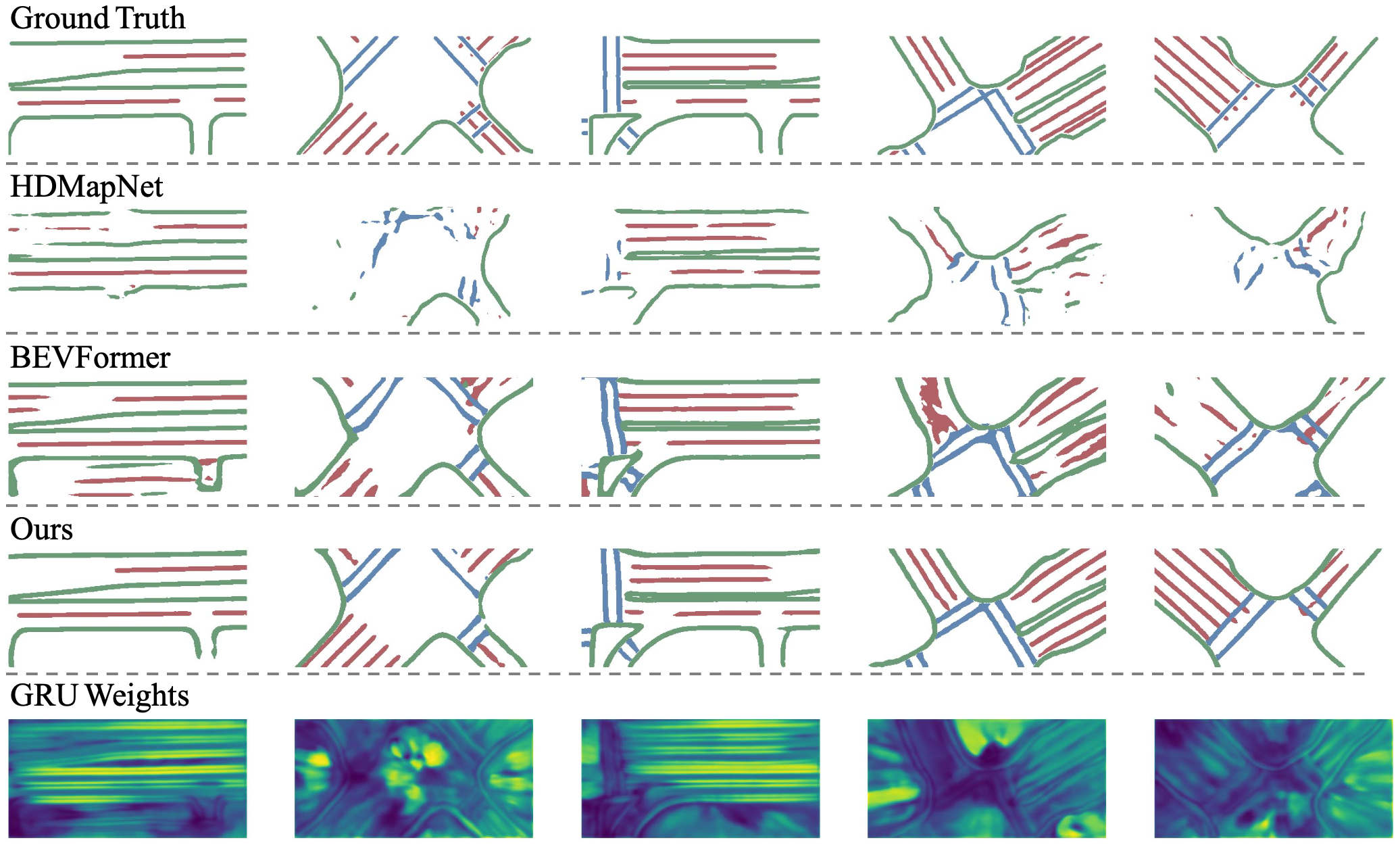
Qualitative results. From the first to the fifth row: Ground truth, HDMapNet, BEVFormer, BEVFormer with
Neural Map Prior and GRU weights. We also visualize zt, the attention map of the last step of the GRU
fusion process. The model learns to selectively combine current and prior map features: specifically, when the
prediction quality of the current frame is good, the network tends to learn a larger zt, assigning
more weight to the current feature; when the prediction quality of the current frame is poor, usually at
intersections or locations farther away from the ego-vehicle, the network tends to learn a smaller zt
for the prior feature.
If you find our work useful in your research, please cite our paper:
@inproceedings{xiong2023neuralmapprior,
author = {Xiong, Xuan and Liu, Yicheng and Yuan, Tianyuan and Wang, Yue and Wang, Yilun and Zhao Hang},
title = {Neural Map Prior for Autonomous Driving},
journal = {Proceedings of the IEEE/CVF International Conference on Computer Vision (CVPR)},
year = {2023}
}
-->